Community articles — Math
Recent

En este documento se explican qué son las matrices, los distintos tipos que hay, algunas operaciones que se hacen con ellas con ellas (y sus respectivas propiedades), además de enseñar cómo realizar estas operaciones en programación. Incluye el concepto de relación binaria, y se explica cómo se pueden representar éstas (si son homogéneas) mediante grafos. y los distintos tipos de éstos últimos. Se recalca la "matriz jacobiana", explicando su función escalar y vectorial
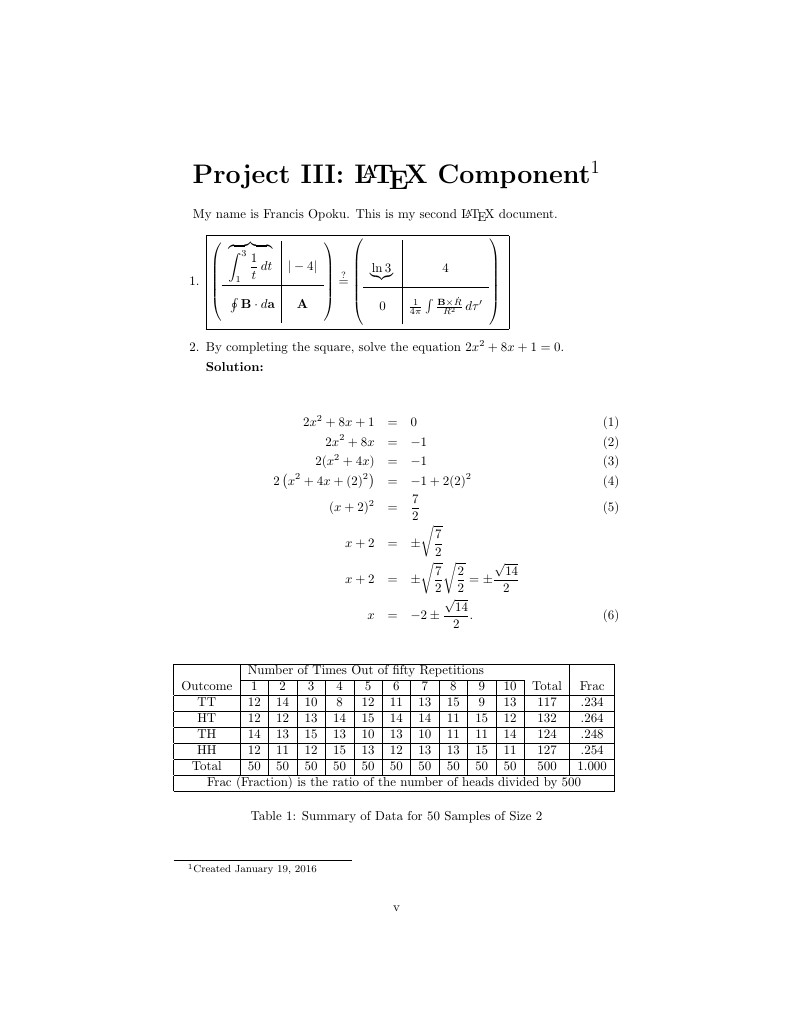
A solution for CSI500 project 3

This paper will state and prove the quadratic formula.

Zeta functions :-)

Chapitre 1, Peip1, Polytech'Nice Sophia


-------------------------------------------------------------- This is all preamble stuff that you don't have to worry about. Head down to where it says "Start here" --------------------------------------------------------------
An introduction to Telescoping Series and Sums.
Here I derive the wave equation in a manner that allows you to look at each step individually
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.