overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
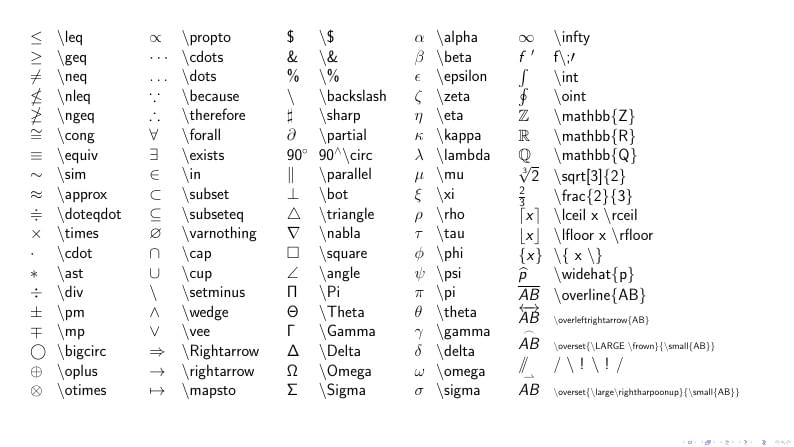
LaTeX symbols cheat sheet
山中 卓 (大阪大学 大学院理学研究科 物理学専攻)先生が作成された科研費LaTeXを、坂東 慶太 (名古屋学院大学) が了承を得てテンプレート登録しています。 詳細はこちら↓をご確認ください。 http://osksn2.hep.sci.osaka-u.ac.jp/~taku/kakenhiLaTeX/
a helpful LaTeX template for your [CS 170] homework
A port of the ELIXIR AH conference poster template to LaTeX, using BAPoster. See https://github.com/exaexa/elixirposter-tex/
Presentation about build in self heating thermal testing of FPGAs.

Gabarit pour le devoir 1 MAT-2903 : Thèmes mathématiques pour l'enseignement secondaire.
A template for creating course quizzes. The template uses the same style file so as to avoid the need for long preamble. The 'Main Document' should be set to the quiz you are working on.
William Senfuma's Résumé
Template for OS Lab Report submission
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.