overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
Weekly Report template for Dr. Katherine Davis's group.
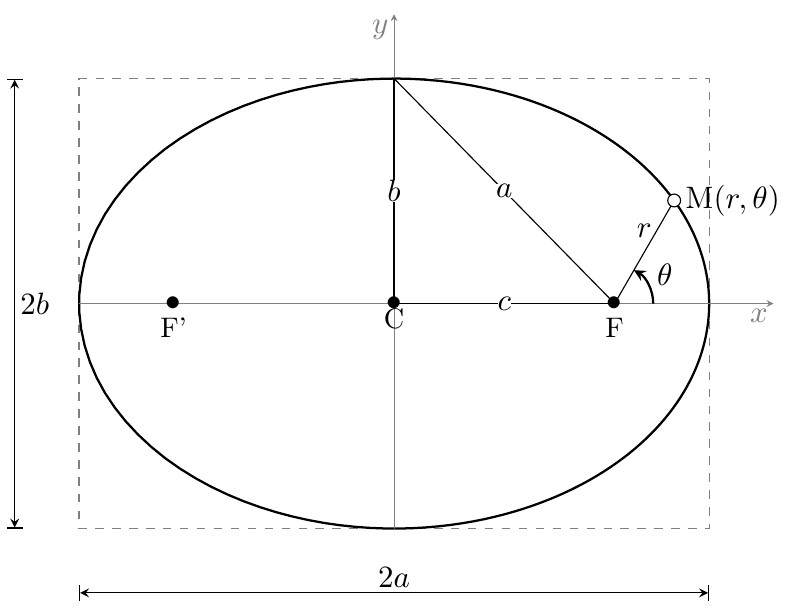
Codes TikZ des figures présents sur le cours "Les coniques" accessible à l'adresse : http://www.femto-physique.fr/mecanique/meca_complement2.php
A template of master thesis project for Department of Health Sciences and Technology (HEST), ETH (Swiss Federal Institute of Technology) Zürich.
ACM DIS2020 Extended Abstracts paper format. For more information see https://dis.acm.org/2020/
Template for bachelor and master theses carried out at the group of modular supercomputing and quantum computing at Goethe University Frankfurt.
IOE Bachelors Proposal Proposal Format, Pulchowk Campus, Tribhuwan University
A very preliminary study of the vle.extension.ibm package of vle in terms of computation time.
paper
This is a template for writing extended abstracts for WPCCG.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.