overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.

Template para elaboração do projeto de Trabalho de Conclusão de Curso para a Escola de Matemática Aplicada FGV-EMAp
Beamer theme for the University of Bergen. Documentation: https://github.com/martinhelso/UiB

Dissertation template for University of Kentucky. Source and information: https://www.as.uky.edu/latex-templates-uk-dissertation. This template was originally published on ShareLaTeX and subsequently moved to Overleaf in November 2019.
Clean CV/resume template with shaded title bars developed by Scott Clark. See also: https://github.com/sc932/resume. Note: This template was originally published on ShareLaTeX but it was moved to Overleaf in November 2019. When moving it to Overleaf we found a bug which was resolved by applying this fix from tex.stackexchange.
A Statistics paper on Correlation and Linear Relationships.
Danilo Plazas Irreño Hoja de Vida
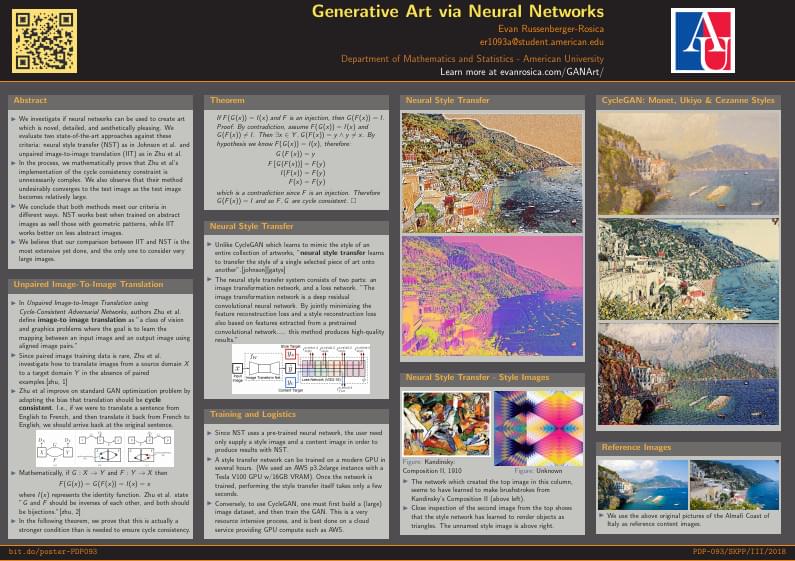
An update of Philippe Dreuw and Thomas Deselaers Theme (see http://www-i6.informatik.rwthaachen.de/~dreuw/latexbeamerposter.php). Includes a QR code, some small formatting and style fixes.

Abstract for the Austrian HPC Meeting 2017 - AHPC17
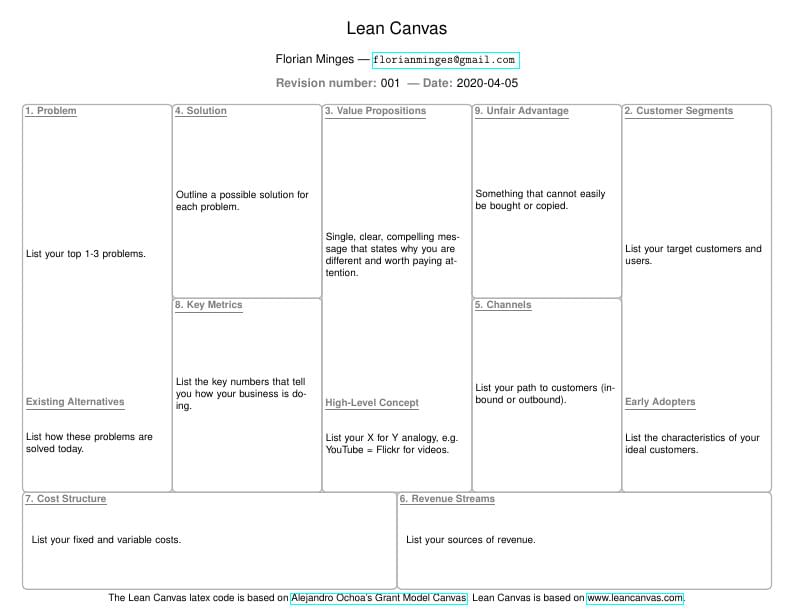
A Lean Canvas template to create a 1-page Business Plan (suited for lean startups). Includes a suggested filling order. Lean Canvas is based on: www.leancanvas.com LaTeX code is derived from Alejandro Ochoa's Grant Model Canvas: https://github.com/OchoaLab/grantModelCanvas
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.