RESORTE
Author:
Adrian Avalos
Last Updated:
7 yıl önce
License:
Creative Commons CC BY 4.0
Abstract:
Spring-Mass
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.
Spring-Mass
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.
\documentclass{article}
\usepackage[utf8]{inputenc}
\setlength{\parindent}{3ex}
\usepackage{graphicx}
\usepackage{amsmath}
\usepackage{amssymb}
\title{Spring}
\author{Avalos Adrian }
\date{June 2019}
\begin{document}
\maketitle
\section{What is a spring?}
In any course of linear differential equations applications are sought that can be solved by the engineering students, for that reason it is important to know how to analyze and interpret the response presented in a system spring mass, not only in the ideal case of a simple harmonic movement without damping, but in the case where you have a buffer, like the one that will be developed next.\\[0.5cm]
Now I am going to to explain that law I used
\begin{enumerate}
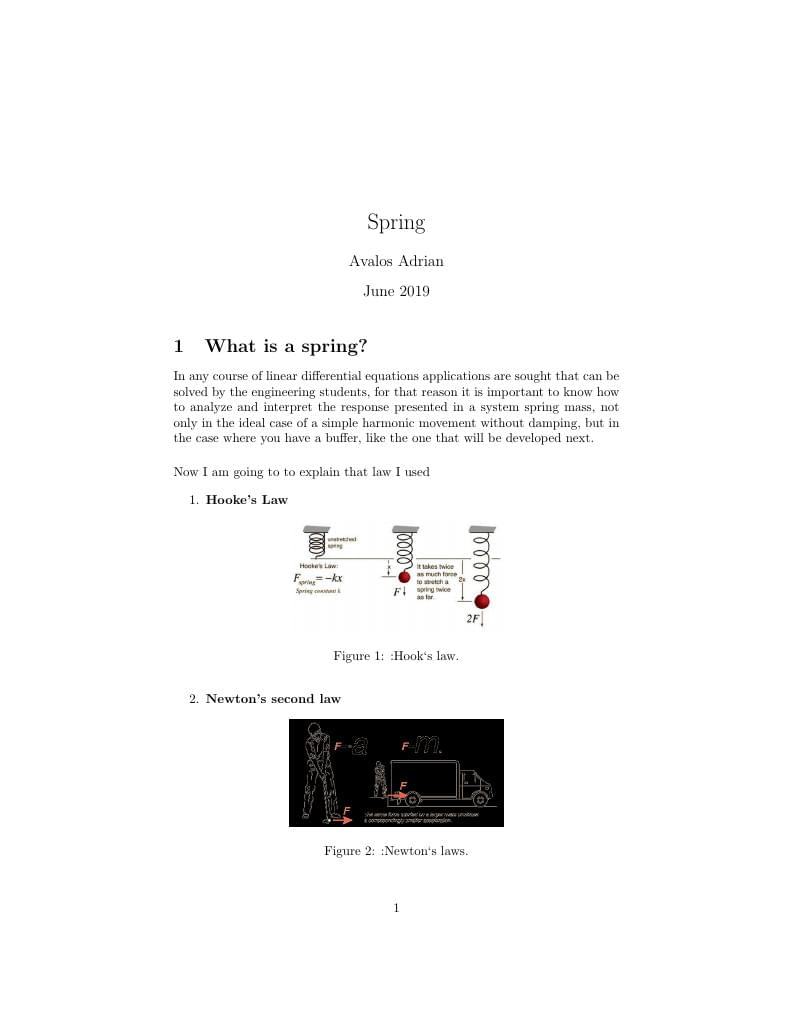
\item \textbf{Hooke's Law}
\begin{figure} [h!]
\centering
\includegraphics[width=0.48\textwidth] {2.jpg}
\caption{\label{fig1}:Hook`s law.}
\end{figure}
\item \textbf{Newton's second law}
\begin{figure} [h!]
\centering
\includegraphics[width=0.48\textwidth] {4.jpg}
\caption{\label{fig1}:Newton`s laws.}
\end{figure}
\end{enumerate}
\section{How to get the equations? }
{Once analyzed the general aspects of the dynamics of a spring or spring in a two-dimensional plane,
Later we have to "create" the system equations that correspond to the dynamics of springs.}
\\[0.5cm]
{We have two mass m1 and m2 and also we have three springs. These masses are moving in a plane, in other words, the spring does that the two masses are moving in the axis x and y.After having understood these moves we have to do a summation of forces applying the two laws both Hooke's laws and Newton`s law.
For mass 1 on the x-axis and y-axis, we have to do a summation of forces, for mass 2 is the same case because we have a system spring-mass, a simple example but in the deep is a good example to apply our knowledge and show how to get an equation to solve it.}
{\textbf{Equations of the summation of forces are:}}
$$ X1''=\frac{-k1Xasen(\theta1)+k2(Xb-Xa)sen(\theta2)}{m1} $$
\\[0.5cm]
$$ Y1''=\frac{k1Xacos(\theta1)-k2(Xb-Xa)cos(\theta2)-m1g}{m1} $$
\\[0.5cm]
$$ X2''=\frac{-k2(Xb-Xa)sen(\theta2)+k3Xasen(\theta3)}{m2} $$
\\[0.5cm]
$$ y2''=\frac{k2(Xb-Xa)cos(\theta2)-k3Xacos(\theta3)-m2g}{m2} $$
{Proceed to solve the different systems of equations by clearing the variables Xa, Xb,Theta1, theta2.}
\textbf{Equations are:}
$$ \theta1''=\frac{cos(\theta1)(k2(Xb-Xa)sen(\theta2))+sen(\theta1)(-k2(Xb-Xa)cos(\theta2)-m1g)}{m1Xa} $$
\\[0.5cm]
$$ \theta2''=\frac{cos(\theta2)(k3Xasen(\theta3))+sen(\theta2)(k3Xacos(\theta3)}{m2Xb} $$
\\[0.5cm]
$Xb''=\frac{sen(\theta2)(-k2(Xb-Xa)sen(\theta2)+k3Xasen(\theta3))-cos(\theta2)(k2(Xb-Xa)cos(\theta2)+k3Xacos(\theta3))}{m2}$
\\[0.5cm]
$Xa''=\frac{sen(\theta1)(-k1Xasen(\theta1)+k2(Xb-Xa)sen(\theta2))-cos(\theta1)(k1Xacos(\theta1)-k2(Xb-Xa)cos(\theta2)-m1g)}{m1}$
Once the equations are found, we proceed to insert them in simulink.
Later we edit the code to be able to have the simulation in Matlab.
\begin{figure} [h!]
\centering
\includegraphics[width=0.7\textwidth] {3.jpg}
\caption{\label{fig1}:Spring in MatLab}
\end{figure}
\section{Conclusion}
After having obtained the equations for the mass-spring system, we managed to understand the importance of the differences equations and more importantly to know how to use the technology to give a solution to them. I can conclude that the work was extensive but the perseverance won and we managed to obtain the spring with the desired movement
\end{document}